この jupyter notebook ファイルは ISSP Data Repository (develop branch) から入手できます。
複数候補を一度に探索する
1回の探索ステップで、2つ以上の候補を一度に評価する場合のチュートリアルです。
[1]:
import numpy as np
import matplotlib.pyplot as plt
import physbo
探索候補データの準備
これまでのチュートリアルと同様、データセットファイル s5-210.csv を保存し、次のように読み出します。
[2]:
def load_data():
A = np.asarray(np.loadtxt('s5-210.csv',skiprows=1, delimiter=',') )
X = A[:,0:3]
t = -A[:,3]
return X, t
X, t = load_data()
X = physbo.misc.centering(X)
simulator の定義
[3]:
class Simulator:
def __init__( self, t ):
self.t = t
def __call__( self, action ):
return self.t[action]
simulator = Simulator(t)
# 実行例
simulator([1, 12, 123])
[3]:
array([-1.01487066, -1.22884748, -1.05572838])
最適化の実行
[4]:
# policy のセット
policy = physbo.search.discrete.Policy(test_X=X)
# シード値のセット
policy.set_seed( 0 )
num_search_each_probe によって、各探索ステップにおいて評価する候補数を指定することができます。
下記の実行例だと、ランダムサーチにより 2 ×10 = 20回、ベイズ最適化により 8 ×10 = 80回 simulator を評価することになります。
引数
max_num_probes: 探索ステップ数num_search_each_probe: 各探索ステップにおいて評価する候補数
[5]:
res = policy.random_search(
max_num_probes=2, num_search_each_probe=10, simulator=simulator
)
res = policy.bayes_search(
max_num_probes=8,
num_search_each_probe=10,
simulator=simulator,
score="EI",
interval=2,
num_rand_basis=100,
)
0001-th multiple probe search (random)
current best f(x) = -0.980054 (best action = 4547)
list of simulation results
f(x)=-1.070602 (action = 15673)
f(x)=-1.009056 (action = 9559)
f(x)=-1.195844 (action = 16927)
f(x)=-0.980054 (action = 4547)
f(x)=-0.992820 (action = 2553)
f(x)=-1.146676 (action = 13144)
f(x)=-1.006255 (action = 10827)
f(x)=-0.999862 (action = 1995)
f(x)=-1.055445 (action = 10763)
f(x)=-1.100970 (action = 16450)
0002-th multiple probe search (random)
current best f(x) = -0.980054 (best action = 4547)
list of simulation results
f(x)=-1.208666 (action = 13085)
f(x)=-1.069404 (action = 15133)
f(x)=-1.031642 (action = 1706)
f(x)=-1.016702 (action = 2464)
f(x)=-1.172569 (action = 17812)
f(x)=-1.082219 (action = 16533)
f(x)=-1.025272 (action = 1336)
f(x)=-1.031761 (action = 10076)
f(x)=-0.984972 (action = 8876)
f(x)=-1.107730 (action = 15577)
Start the initial hyper parameter searching ...
Done
Start the hyper parameter learning ...
0 -th epoch marginal likelihood -22.83973847978998
50 -th epoch marginal likelihood -24.17761713990829
100 -th epoch marginal likelihood -24.831018285821855
150 -th epoch marginal likelihood -25.15416148652374
200 -th epoch marginal likelihood -25.33446562798866
250 -th epoch marginal likelihood -25.455155010625035
300 -th epoch marginal likelihood -25.550091453614574
350 -th epoch marginal likelihood -25.63130127933855
400 -th epoch marginal likelihood -25.70238745744905
450 -th epoch marginal likelihood -25.764347677344432
500 -th epoch marginal likelihood -25.817697844806304
Done
0003-th multiple probe search (EI)
current best f(x) = -0.963125 (best action = 7028)
list of simulation results
f(x)=-0.999831 (action = 8311)
f(x)=-0.971324 (action = 7695)
f(x)=-1.022353 (action = 11640)
f(x)=-2.231758 (action = 2989)
f(x)=-1.330630 (action = 14999)
f(x)=-1.490831 (action = 8998)
f(x)=-0.963461 (action = 8382)
f(x)=-1.006954 (action = 1144)
f(x)=-1.072227 (action = 8240)
f(x)=-0.963125 (action = 7028)
0004-th multiple probe search (EI)
current best f(x) = -0.963125 (best action = 7028)
list of simulation results
f(x)=-1.020075 (action = 2308)
f(x)=-1.013442 (action = 14800)
f(x)=-1.021923 (action = 2271)
f(x)=-1.008847 (action = 2272)
f(x)=-1.011485 (action = 2235)
f(x)=-1.124811 (action = 15021)
f(x)=-1.019125 (action = 2345)
f(x)=-1.034768 (action = 2344)
f(x)=-1.509526 (action = 15013)
f(x)=-1.007610 (action = 14763)
Start the initial hyper parameter searching ...
Done
Start the hyper parameter learning ...
0 -th epoch marginal likelihood 23.073628205443782
50 -th epoch marginal likelihood 9.719167854722315
100 -th epoch marginal likelihood 1.4617496079117132
150 -th epoch marginal likelihood -3.798836012927623
200 -th epoch marginal likelihood -7.323789523166454
250 -th epoch marginal likelihood -9.785789330036504
300 -th epoch marginal likelihood -11.56593442759742
350 -th epoch marginal likelihood -12.890764162978456
400 -th epoch marginal likelihood -13.902281570598056
450 -th epoch marginal likelihood -14.693902339866337
500 -th epoch marginal likelihood -15.329257712391108
Done
0005-th multiple probe search (EI)
current best f(x) = -0.963125 (best action = 7028)
list of simulation results
f(x)=-1.065906 (action = 6464)
f(x)=-1.016857 (action = 9064)
f(x)=-1.052785 (action = 17091)
f(x)=-1.091519 (action = 14954)
f(x)=-0.984545 (action = 7141)
f(x)=-0.994764 (action = 3492)
f(x)=-0.986965 (action = 6497)
f(x)=-1.059148 (action = 5)
f(x)=-1.062454 (action = 16945)
f(x)=-1.076059 (action = 677)
0006-th multiple probe search (EI)
current best f(x) = -0.963125 (best action = 7028)
list of simulation results
f(x)=-0.990597 (action = 1590)
f(x)=-1.076706 (action = 13246)
f(x)=-1.145412 (action = 16280)
f(x)=-0.995306 (action = 11877)
f(x)=-1.023616 (action = 11106)
f(x)=-1.052131 (action = 11400)
f(x)=-0.991510 (action = 1627)
f(x)=-1.227426 (action = 6008)
f(x)=-0.965286 (action = 4587)
f(x)=-1.060802 (action = 13209)
Start the initial hyper parameter searching ...
Done
Start the hyper parameter learning ...
0 -th epoch marginal likelihood 473.6562814170836
50 -th epoch marginal likelihood 363.6169713454166
100 -th epoch marginal likelihood 280.4346034309093
150 -th epoch marginal likelihood 218.0054785862581
200 -th epoch marginal likelihood 170.65000562578436
250 -th epoch marginal likelihood 134.22268953329905
300 -th epoch marginal likelihood 105.78132811282859
350 -th epoch marginal likelihood 83.25038707552301
400 -th epoch marginal likelihood 65.15788635125642
450 -th epoch marginal likelihood 50.44852382153766
500 -th epoch marginal likelihood 38.35577038115986
Done
0007-th multiple probe search (EI)
current best f(x) = -0.960321 (best action = 8213)
list of simulation results
f(x)=-1.057612 (action = 14984)
f(x)=-0.990722 (action = 10878)
f(x)=-0.963464 (action = 8250)
f(x)=-1.043198 (action = 14947)
f(x)=-0.983485 (action = 10915)
f(x)=-0.968059 (action = 8287)
f(x)=-1.059552 (action = 14983)
f(x)=-0.999771 (action = 10841)
f(x)=-0.960321 (action = 8213)
f(x)=-0.977957 (action = 10952)
0008-th multiple probe search (EI)
current best f(x) = -0.960321 (best action = 8213)
list of simulation results
f(x)=-0.995292 (action = 703)
f(x)=-0.983678 (action = 8968)
f(x)=-0.997529 (action = 8967)
f(x)=-0.999770 (action = 666)
f(x)=-0.992400 (action = 740)
f(x)=-1.014959 (action = 4879)
f(x)=-0.977174 (action = 11967)
f(x)=-1.005922 (action = 629)
f(x)=-1.013689 (action = 592)
f(x)=-0.972775 (action = 8969)
Start the initial hyper parameter searching ...
Done
Start the hyper parameter learning ...
0 -th epoch marginal likelihood 70.33429991441128
50 -th epoch marginal likelihood 28.7644910600593
100 -th epoch marginal likelihood 0.4848519552564312
150 -th epoch marginal likelihood -18.236558043785692
200 -th epoch marginal likelihood -32.06535289863197
250 -th epoch marginal likelihood -42.7681819466728
300 -th epoch marginal likelihood -51.46052158149965
350 -th epoch marginal likelihood -56.687714339736516
400 -th epoch marginal likelihood -61.70347758865685
450 -th epoch marginal likelihood -65.19178853027779
500 -th epoch marginal likelihood -68.0555175525907
Done
0009-th multiple probe search (EI)
current best f(x) = -0.960321 (best action = 8213)
list of simulation results
f(x)=-1.055798 (action = 985)
f(x)=-0.997708 (action = 3033)
f(x)=-1.038770 (action = 1614)
f(x)=-1.031694 (action = 652)
f(x)=-1.033686 (action = 1207)
f(x)=-1.036349 (action = 763)
f(x)=-1.033301 (action = 1688)
f(x)=-1.045945 (action = 3133)
f(x)=-1.052235 (action = 947)
f(x)=-1.040833 (action = 430)
0010-th multiple probe search (EI)
current best f(x) = -0.960321 (best action = 8213)
list of simulation results
f(x)=-2.497328 (action = 17945)
f(x)=-0.990424 (action = 1480)
f(x)=-0.991675 (action = 5957)
f(x)=-0.990406 (action = 1517)
f(x)=-0.990488 (action = 1443)
f(x)=-1.094922 (action = 17908)
f(x)=-1.058552 (action = 3766)
f(x)=-1.053202 (action = 3803)
f(x)=-1.110345 (action = 15737)
f(x)=-0.990559 (action = 1554)
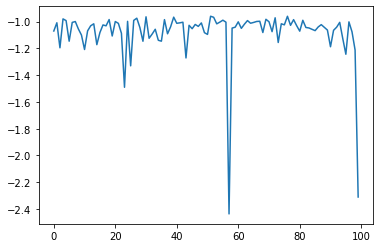
結果の確認
[6]:
plt.plot(res.fx[0:res.total_num_search])
[6]:
[<matplotlib.lines.Line2D at 0x114d58590>]
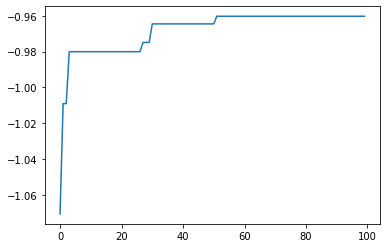
[7]:
best_fx, best_action = res.export_all_sequence_best_fx()
plt.plot(best_fx)
[7]:
[<matplotlib.lines.Line2D at 0x114daa590>]
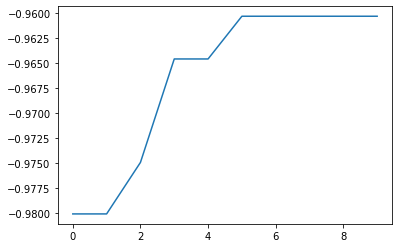
res.export_sequence_best_fx() により、各ステップまでに得られたベスト値とその action の履歴 を得られます。
res.export_all_sequence_best_fx() との違いは、simulator の評価毎ではなく、探索ステップ毎の情報になるという点です。(今回の場合は合計ステップ数は 10, 評価数は 100 です)
[8]:
best_fx, best_action = res.export_sequence_best_fx()
plt.plot(best_fx)
[8]:
[<matplotlib.lines.Line2D at 0x1151008d0>]